城市化的进程在世界各地快速发展,大规模和超大规模城市仍在不断扩展和发展,对于城市管理的公共服务建设不断提出挑战。随着技术和科技的发展,智慧城市在近年被提出并付诸于实践之中,随着城市大数据和城市物理空间的技术应用,构建城市全息3D的整体数据成为可能,WIMI微美全息(NASDAQ:WIMI)开发一种基于倾斜摄影测量点云的全息3D建筑模型重建算法,这可以帮助城市管理者们更好的利用城市空间,并做出最合理的建设和规划并进行有效的管理。
建筑物的3D模型可以分为多个细节层次,具有不同的几何和语义信息,用于不同的应用级别。区分建筑物屋顶和立面的模型构成了智慧城市的结构系统数据,在城市建设和管理中应用最为广泛。随着飞行器和传感器的快速发展,点云已成为三维城市重建的主要数据,同时实现了自动化3D城市重建。激光雷达技术(LiDAR)作为3D点云数据采集的重要手段,可以直接获取目标的位置,省去了求解图像对应关系的复杂过程,已广泛应用于城市三维建筑重建,然而,机载激光扫描ALS数据中经常缺少建筑立面,特别是对于高层建筑。
WIMI微美全息基于倾斜摄影测量点云的全息建筑模型重建算法,结合来自航空倾斜图像的摄影测量点云和建筑物的二维足迹,摄影测量点云可以从与运动结构(SFM)和多视图全息立体(MVHS)管道充分重叠的图像生成。倾斜的摄影测量点云来重建建筑模型。摄影测量包括使用照片创建3D模型,通过倾斜点云从不同角度捕捉的一组3D点,通过使用从多个角度捕捉的点云,可以创建更精确的建筑的全息三维模型。
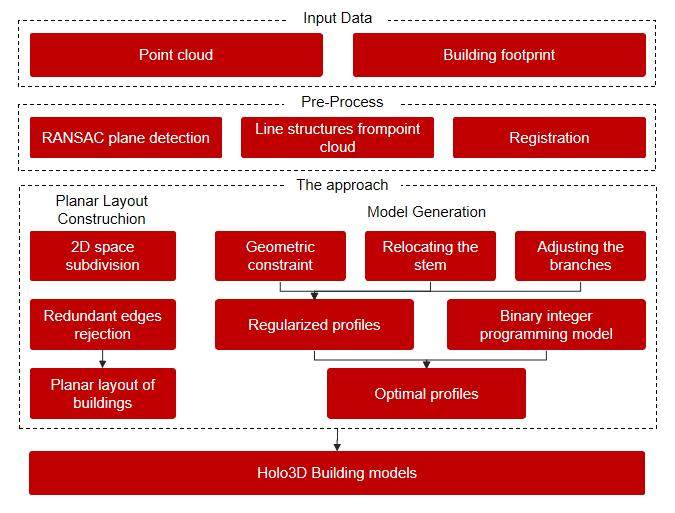
WIMI微美全息基于倾斜摄影测量点云的全息建筑模型重建算法在预处理步骤中,从点云中提取垂直平面,然后投影到坐标平面上以生成建筑物的线结构。之后,引入足迹数据并与坐标平面中的点云精确对齐,因为两种数据类型之间的来源和表示差异不可避免地会导致位置偏差。使用线要素作为基元是基于两个数据制图表达的首选替代方法。
在第一阶段,使用从点云生成的建筑物的覆盖区数据和建筑物的线结构构建建筑物的平面布局。根据覆盖区重新定向边,并根据空间一致性进行筛选。在第二阶段,对于平面布局中的每个边,位于其上的立面点将投影到其垂直平面上,从而产生点密度分布。然后通过聚类、正则化和二进制整数规划函数生成每个边的最佳配置文件。最后,WIMI微美全息基于倾斜摄影测量点云的全息建筑模型重建算法,将平面布局和轮廓的组合生成二维拓扑,以重建建筑物的全息三维模型。一旦创建了全息三维城市建筑模型,它就可以用于各种智能城市应用,如城市规划、灾难响应和设施管理。
WIMI微美全息基于倾斜摄影测量点云的全息建筑模型重建算法,可以极大地优化城市全息3D模型的构建,提供更高效和便捷的方案对城市模型重建。城市规划和建设使用该模型来可视化和分析影响。这有助于优化土地利用、基础设施规划和交通系统。比如城市交通管理,通过该技术重建可以用于创建交通模式和拥堵的详细地图,这可以帮助城市当局优化交通流并减少拥堵。在城市公共安全方面,通过该技术重建可用于创建公园和街道等公共空间的全息3D模型,这有助于识别盲点和黑暗区域等潜在安全风险。这些信息可用于优化照明和监控系统,以提高公共安全。
总体而言,WIMI微美全息(NASDAQ:WIMI)基于倾斜摄影测量点云的全息建筑模型重建算法通过曲面重建、纹理映射、点云配准等对城市模型提供更加高效的处理方案,提高城市全息三维模型的更新效率,可用于优化城市规划、改善基础设施管理和提高居民生活质量,在智能城市的发展中发挥关键作用。
(免责声明:本文为本网站出于传播商业信息之目的进行转载发布,不代表本网站的观点及立场。本文所涉文、图、音视频等资料之一切权利和法律责任归材料提供方所有和承担。本网站对此资讯文字、图片等所有信息的真实性不作任何保证或承诺,亦不构成任何购买、投资等建议,据此操作者风险自担。)